Carbot continues to grow. Now I have a full ROV mode available. It’s rather amusing because it really is an Android phone on top of a remote control car. The phone talks to an Aduino via BLE to control the servo and the motors. However I now have a console to monitor the device system and can control it to drive around a house or a yard. The point was to use the cell network to allow this to run anywhere. Below are the details.
The two modes of Carbot
This time I wanted to make sure I could either run it in ROV mode or in teathered mode. Teathered mode is what I had built up to this point. In this case I carry the phone attached to the viewer and then the Android app is connecting to the car via bluetooth. This has been good but it has also been limiting. So I came up with ROV Mode. In this case the phone is on the car and I can run it from a desktop.
This is what it looks like on the car.

This is what the Android app looks like
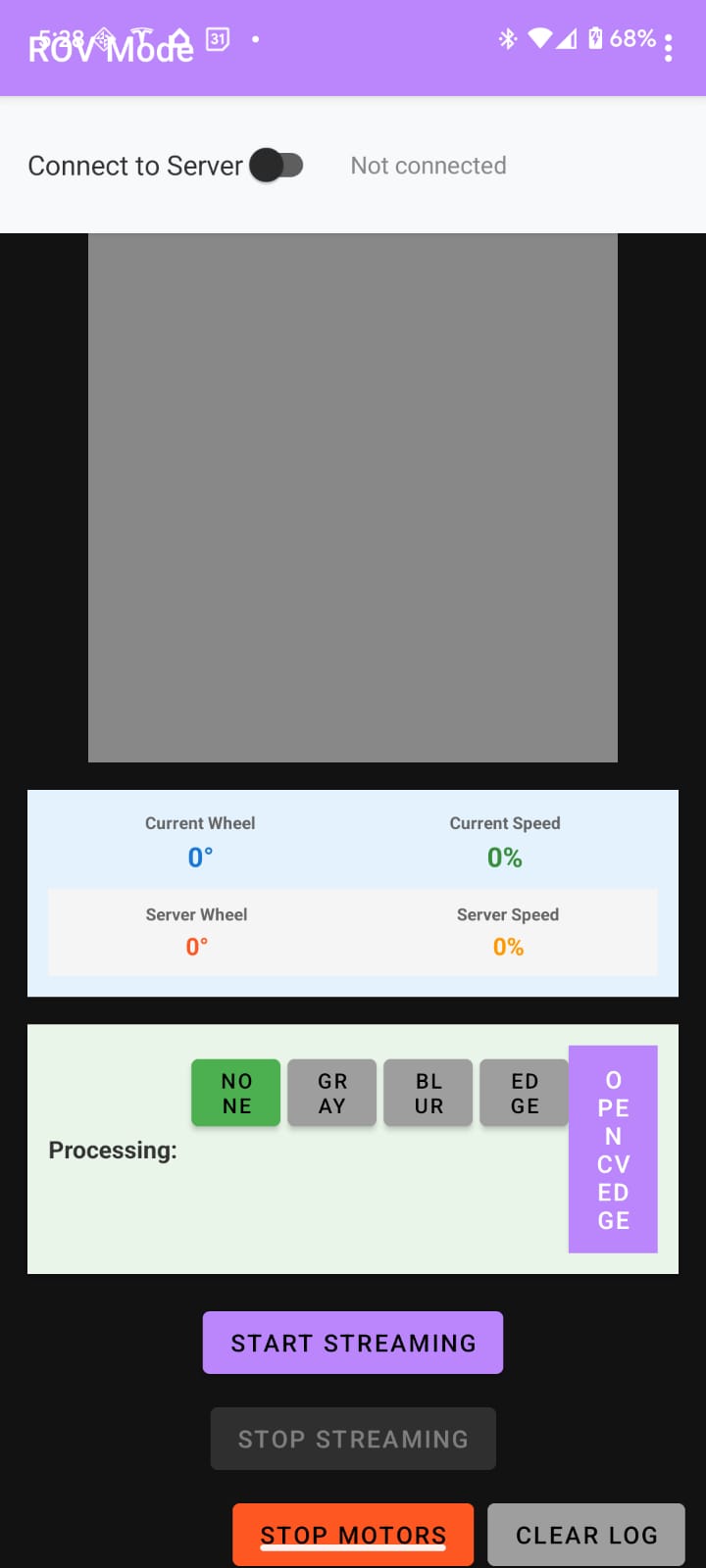
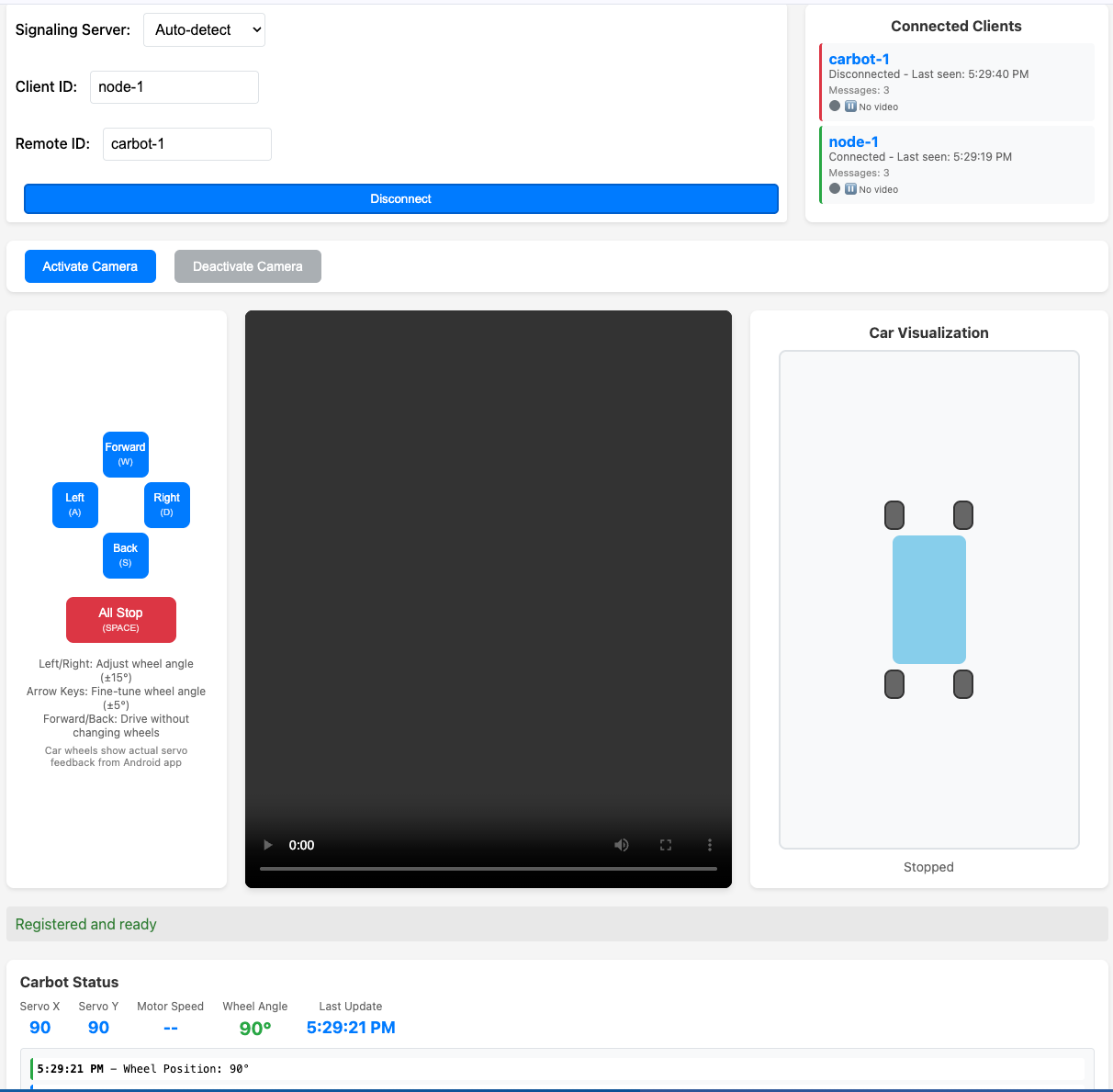
This is what the desktop console currently looks like
Bonus: I played with OpenCV
I started down a path to try and improve the abilities of the CNN to learn by first preprocessing the image with OpenCV. OpenCV is a fantastic set of libraries that let you manipulate the image. In my case, I just tried some false colors and edge detection. It was somewhat helpful but I think I will come back to this side adventure. I think the real problem is that I am just training it wrong.
What is next?
I think the autopilot is terrible. This is probably the biggest issue. I typically gather about 5 minutes of training time and then run the model. It doesn’t work very well and for behavior cloning I feel like I am just missing the fundamentals. So I’m going to go and work on just the learning part using a Unity simulator.